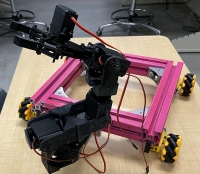
R.I.V.A: Mobile Robot Platform with Arm
Rover + 5-DOF arm designed in SolidWorks, simulated in ROS, controlled via Raspberry Pi + STM32.
- Inverse kinematics and higher-level control on Raspberry Pi (Python)
- STM32 embedded motor control in C++ via UART
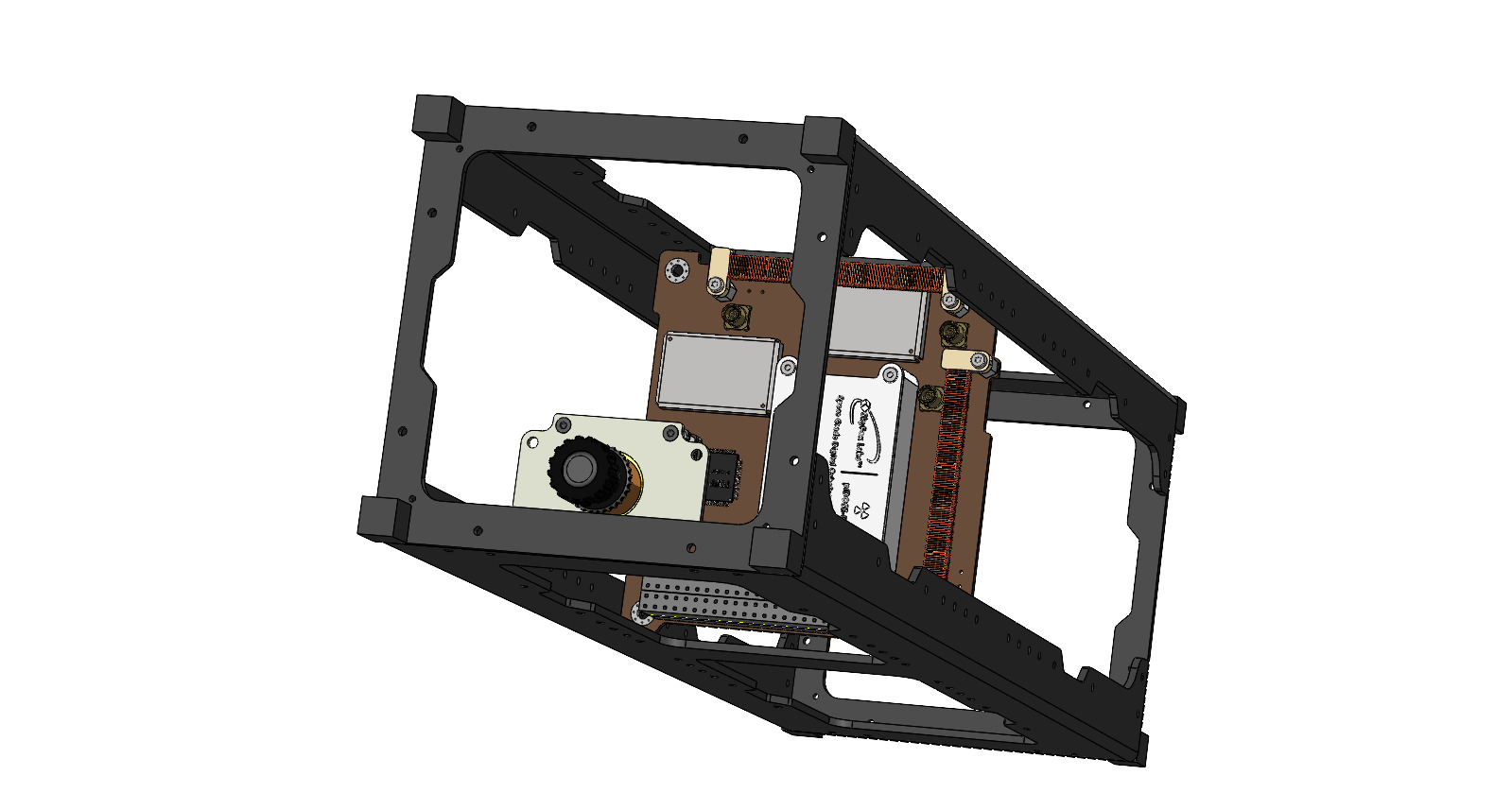
- Custom Altium PCBs: power regulation, motor drivers, control I/O